
Digital centralenhet
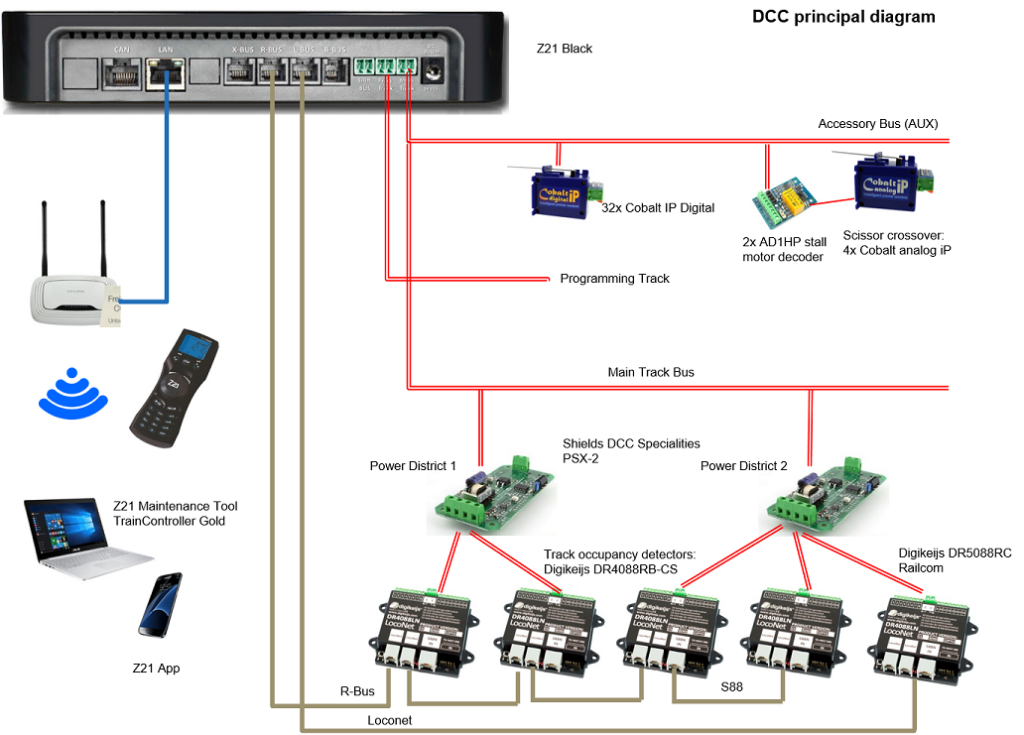
Rocos Z21 Black används som centralenhet i DCC-systemet. Valet av Z21 som centralenhet blev ganska självklart när SMJ efter många år med Lenz gick över till Z21. Jag uppfattar också Z21 som en komplett konsumentprodukt med stor spridning och löfte om långsiktig support. Andra centraler kan säkert vara mer tekniskt begåvade, och det är väl egentligen en smakfråga vilken man väljer. Vid första intrycket erbjuder Z21 många anslutningsmöjligheter, dock saknas både S88 och Lenz RS-bussen. SMJ har kvar Lenz-systemet för Littfinskis spårdetektorer, som hos SMJ har kopplats in direkt till PCn (ej via Z21) eftersom Lenz RS-bussen saknas i Z21. Därför kopierar jag i det avseendet inte SMJs system utan väljer bort Littfinski till förmån för Digikeijs spårdetektering som ansluts via Roco-bussen eller Loconet.
Strömkapaciteten från Z21 är 3.2 A, vilket har visat sig vara fullt tillräckligt för min bana, med ett 10-tal uppställda tåg (dekodrarna drar ström också i viloläget), 5-6 tåg i samtidig rörelse, vagnsbelysning, 36 växelmotorer (drar ström också i viloläget), och drygt 70 spårledningar. Skulle strömförbrukningen slå i taket, kan centralenheten lätt kompletteras med en booster. Aktuell strömförbrukning kan övervakas i realtid från Z21 Maintenance Tool, som är en PC-programvara ansluten till Z21.
Z21 har en termisk kortslutningssäkring (långsam) som slår ifrån digitalmatningen vid kortslutning. Säkringen är till för att skydda Z21. Men kortslutningar och överspänningsspikar och andra störningar på digitalmatningen kan slå sönder lokdekodrar, få växelmotorer att tappa sina digitaladresser, etc., något som jag själv har fått erfara. Olika former av kondensatorkretsar i powerpacks och vagnsbelysningar tycks förvärra problematiken. En snabb koll på olika forum på nätet bekräftar den här typen av generella problem oavsett vilken centralenhet man har. Någon form av extra skydd för banmatningen kan alltså rekommenderas.
Spårspänningen kan lätt ställas in i Z21. SMJ har 14.5 V som standard. Jag började med 14 V, men upptäckte att Digikeijs spårledningsdetektorer orsakar ett spänningsfall på 1-2 V, och även shieldsen ger ett om än litet spänningsfall. Till detta kan läggas ytterligare spänningsfall i kablage och i rälsen med upp till 3 m långa blocksträckor. Resulterande banspänning riskerar alltså att bli så låg som 11-12 V, vilket är på tok för lågt för gamla hembyggda lok med tröga utväxlingar – som törstar efter lite mer ”kräm”. Nuförtiden har jag Z21 inställd på 15 V, och överväger ytterligare upptrappning till 15.5 V eller 16 V.
Kablage och shields
Den digitala matningen har delats upp i två parallella ”bussar”, en för själva banmatningen och en separat buss för växelmotorerna (och ev. annan DCC kringutrustning). Båda bussarna, som båda är bärare av DCC-signalen, utgörs av två tvinnade 1.5 kvmm RKUB-kablar, en röd och en svart. För anslutning av de enskilda spårledningarna till respektive Digikeijs spårledningsdetektor används 0.75 kvmm RKUB. För skarvar och fördelningsdon används kontaktdon av den klämtyp som används i bilar, och som kan inköpas för en billig penning hos t.ex. Biltema.
Svart kabel är ”common”, vilket i och för sig inte är så relevant eftersom DCC-matningen är växelström som saknar plus- och minuspol. Men det har betydelse för de shields från DCC Specialities som jag använder. Banmatningen är i sig uppdelad i två ”power districts” som löper igenom varsin shields – och för deras inkoppling är det bra att veta vilken pol som jag har bestämt som ”common”. Shieldsen klipper banmatningen till sitt ”power district” blixtsnabbt vid kortslutning, och skyddar därmed den rullande materielen. Fabriksinställt bryter shieldsen vid 3.8 A, vilket är högre än Z21ans 3.2 A. Men shieldsen är mycket snabbare än Z21ans tröga termosäkring, och bryter därför innan Z21 hinner reagera. Det går dock att programmera om shieldsen så att de bryter vid en lägre (eller högre) strömnivå om så skulle önskas.
Efter installation av shieldsen avslöjades en mängd vagnar som orsakade korta, intermittenta kortslutningar under gång, kortslutningar som var för korta för att få Z21ans tröga termosäkring att lösa ut. Så det blev lite pyssel att lokalisera och fixa till dessa vagnar….
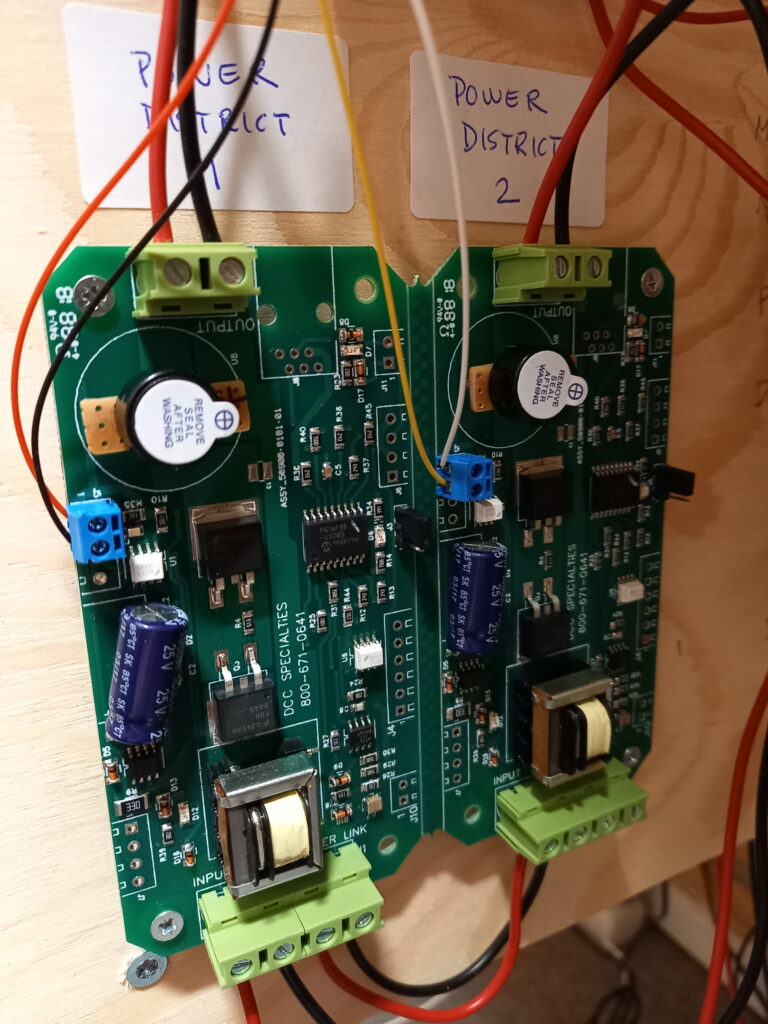
Två shields från DCC Specialities för respektive ”Power Districts”. Kompletterade med summersignal och LED-indikering.
Korskoppling
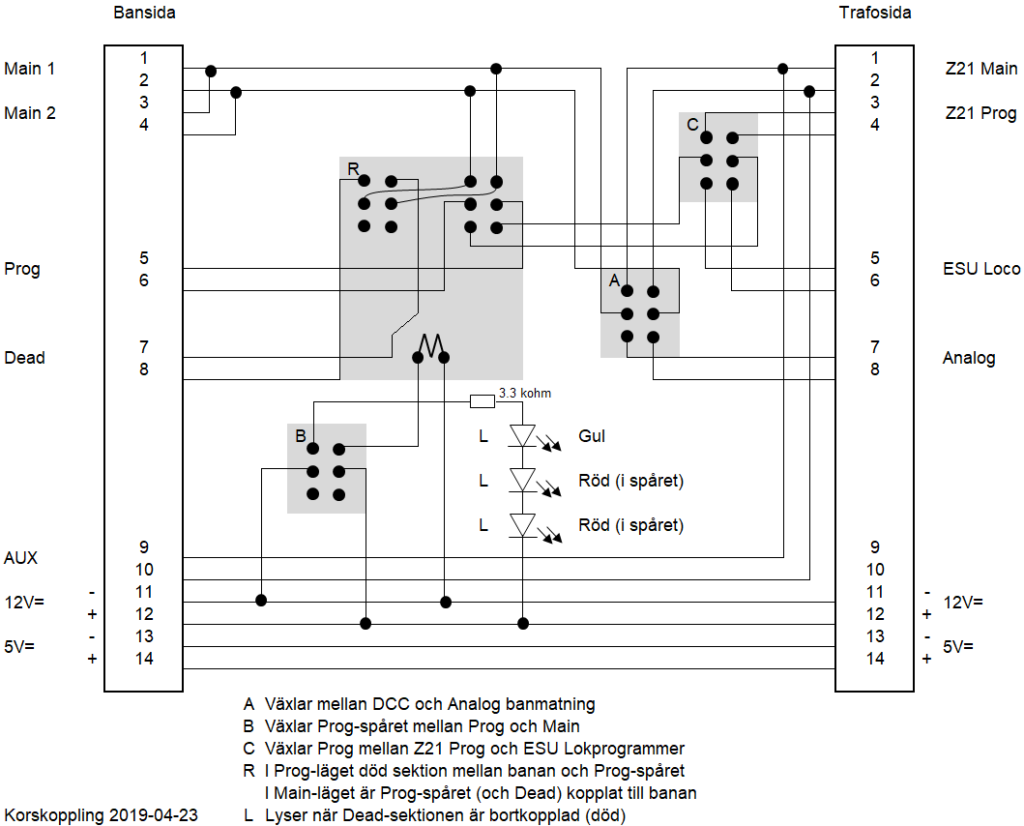
För att öka flexibiliteten och underlätta omkopplingar kan det vara en bra idé att sätta upp en korskoppling. Korskopplingen för banmatningen framgår av följande diagram. Banmatningen är omkopplingsbar mellan analog och digital drift, vilket är behändigt för testkörning av analoga lok – t.ex. hembyggen – innan de chippas. Växelbussen (AUX) är dock alltid digital, och växlarna manövreras därför digitalt även vid analog körning.
Programmeringsspåret är omkopplingsbart till banmatningen, så att man kan köra in och ut från det spåret. Mellan banan och programmeringsspåret finns det en död sektion (”Dead”) för att förhindra oavsiktlig kortslutning mellan sektionerna. Den döda sektionen ska i längd vara minst lika lång som det längsta loket. Jag har valt ca 25 cm vilket räcker gott och väl till för exempelvis dubbelloket Dm. För korrekt omkoppling krävs en 4-polig omkopplare, vilka är dyra och svåra få tag på, så jag tog ett 4-poligt relä från Kjell & Co för 69 kr istället.
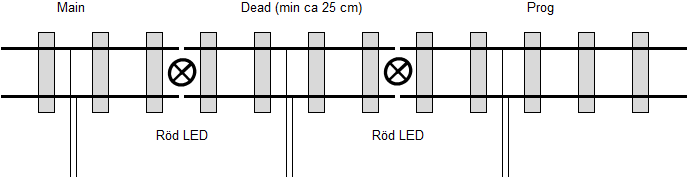
Programmeringsspårets anslutning till banan med en mellanliggande död sektion för att förhindra oavsiktlig kortslutning.
Växelmotorer
Genomgående standardiserat till DCC Concepts digitala växelmotorer ”Cobalt IP Digital”, förutom för kryssväxeln (se särskild artikel under ”Byggtips”). De här motorerna är väldigt behändiga eftersom de är kompletta med dekoder, och lätta att montera, koppla in (inga lödningar), och att programmera. Det finns några saker att tänka på:
Froggen: En nackdel med Cobalt är att deras förenklade frog-switch inte går att använda i kombination med spårdetektering. Eftersom motorn drar ström även i viloläget – i mitt fall dessutom från AUX-bussen och inte från spårbussen – ger det felaktigt ett utslag i spårdetekteringen. För problemfri spårdetektering måste froggen istället kopplas om med den extra switchen som finns på motorn – och sen är ju switcharna på motorn slut. Aktiv växellägesåterkoppling – om man skulle vilja ha det – är t.ex. inte längre möjligt.
Kopplade växlar: För kopplade växlar måste man i regel ”ändra riktning” på en av dem för att de ska synkronisera korrekt vid omläggning. Det här görs med ett speciellt programmeringstrick för Cobalt, där man skickar koden 201 till den motor man vill ändra riktning på. Inte helt uppenbart och lätt att glömma bort. Den valda koden 201 utesluter också möjligheten att använda 201 som adress….
Tappade adresser: Ibland tappar en eller flera motorer sina adresser, i regel efter kortslutningar eller spänningsspikar, vilket är irriterande och inte alltid uppenbart eftersom andra motorer mycket väl kan fortsätta att fungera. Då är det bara till att testa alla motorer och programmera om de felande innan trafiken släpps på igen. Är det kopplade växlar, måste även omprogrammering med koden 201 (se ovan) utföras. Shields och/eller överspänningsskydd bör monteras på matningsbussarna för att eliminera problemet med tappade adresser.
Ett alternativ till Cobalt är Circuitrons Tortoise-motor, med separat NCE Switch-IT Mk2 växeldekoder. Dessa används på SMJ. Fördelen med Tortoise är att den har två generella switchar så man kan få både frog-styrning och aktiv växellägesåterkoppling. Tortoise är också mer tystgående i jämförelse med Cobalt, som faktiskt är ljudmässigt lite störig. Men Tortoise blir lite mer komplicerad att koppla in med den separata dekodern – och vad värre är, dekodern är inte kompatibel med Railcom-funktionen (Railcom är en funktion där loken själva rapporterar in sin adress via spårdetekteringen till styrprogrammet, t.ex. TrainController).
Spårdetektering
Standardiserat till Digikeijs detektorer i DR4088RB-serien, plus en av deras Railcom-detektor 5088RC. 4088-detektorerna emulerar Rocos egna detektor, och ansluts via R-bussen till Z21. Railcom-detektorn ansluts till Z21 via Loconet. Jag uppfattar Digikeijs produkter som prisvärda, lätta att installera, och lätta att konfigurera/programmera. Det som däremot förvånar är att specifikationerna för 4088 och 5088 är så pass olika, och faktiskt ger oönskat synbara effekter på banan. Man kanske rentav inte ska blanda de båda produkterna på en och samma bana?
Spänningsfall: 4088 orsakar 2 V spänningsfall, medan 5088 orsaker 1 V spänningsfall. Effekten av spänningsskillnaden på ett lok som går från den ena till den andra detektorn är fullt märkbar.
Motstånd för detektering: För att 5088 ska ”dra” krävs högst 1 kohm, medan 4088 ”drar” redan vid högst 5 kohm. Om man då som jag byggt med 4088 först, och försett vagnarna med 5 kohm, får man fin detektering i 4088, men ingen alls i 5088 förrän det står minst fem vagnar på spåret….
Banmatning: Enligt specen behöver 5088 minst 15 V för korrekt funktion, så med 5088 finns det alltså ytterligare ett skäl att vrida upp spänningen från Z21an….
Av princip har jag alltid gjort skarvarna dubbelsidigt isolerade, även om enkelsidigt isolerade skulle fungera i de allra flesta fallen – och helt enkelt bara låta ”common”-sidan mata ena rälen obehindrat utan avbrott. Vid några tillfällen har jag behövt komplettera med några korta spårledningar, där har jag ”fuskat” genom att bara göra ett enkelsidigt avstick med 0.5 mm skärskivan i Dremel-toolet.
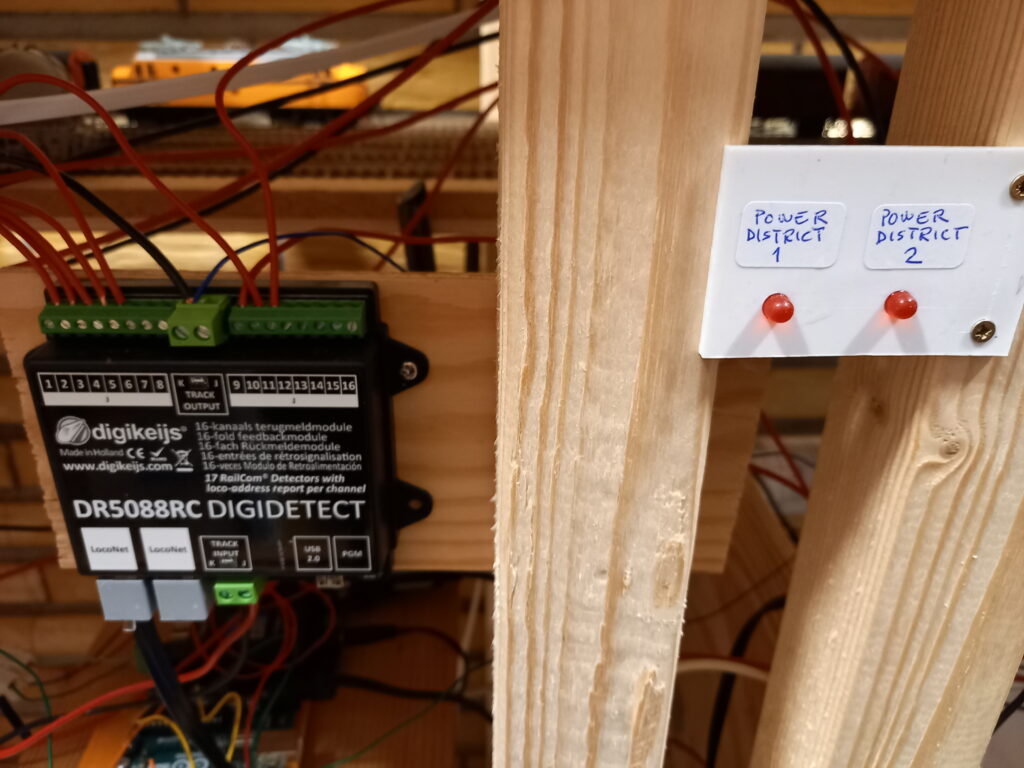
Bilden visar LED-indikering för respektive ”Power District”, och anslutning av spårledningar till Digikeijs spårledningsdetektor.
Manövrering
Under byggperioden användes Z21 Appen på mobiltelefonen och Rocos trådlösa Multimaus för programmering av växelmotorer och manövrering av bana och tåg. För programmering av lokdekodrar används ESU Lokprogrammer. När banan hade utvecklats i lite mer färdigt skick installerades TrainController Gold (TC Gold), som numer utgör det huvudsakliga styrsystemet för banan och tågen. ESU Lokprogrammer och Multimausen kommer då och då till användning för snabb programmering och test av nya lok, och Z21 Appen på mobiltelefonen har visat sig vara behändig för snabb omprogrammering av växelmotorer när de har tappat adressen, vilket numer tursamt inte sker så ofta.
TC Gold är ett mycket avancerat system med oändligt många funktioner och möjligheter. Lyckligtvis kan man ganska lätt komma igång med några enkla grundläggande funktioner för styrning av bana och tåg, och därefter i egen takt upptäcka nya möjligheter och bygga på med mer avancerade funktioner. Jag har i dagsläget ett 10-tal tåg på banan med 5-6 samtidiga tåg i rörelse, där systemet väljer tågvägar och spår, beroende på om det är passagerartåg (behöver plattformsspår) eller godståg, etc. TC Gold ger tågen skalenlig acceleration, hastighet, och inbromsning, och förhindrar att tågen kommer i konflikt med varandra och förorsakar kollisioner. För närvarande testar jag möjligheterna för automatisk rundgång och växling av tågsätt.
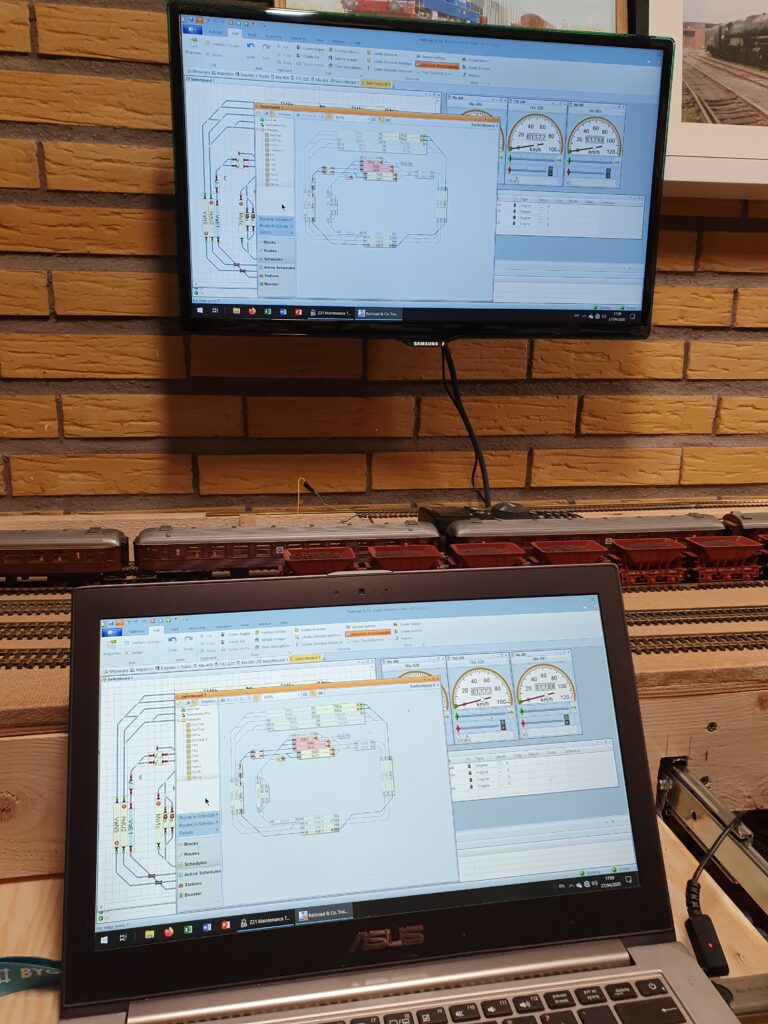
TrainController Gold med bilden replikerad på en större TV-skärm.
Brandvägg
För att få systemet att koppla ihop och fungera måste man i datorns inställningar för brandväggen tillåta att applikationerna för TrainController och Z21 Maintenance Tool kan kommunicera genom brandväggen.
TrainController 10 och Internet
Från och med version 10 av TrainController krävs tillgång till Internet för att licensnyckeln ska låsa upp vid uppstart av programmet. Enligt de allmänna villkoren förbehåller sig leverantören även rätten att under pågående session verifiera licensen då och då över Internet, även om det är oklart om så sker just nu.
För de som av olika skäl tidigare haft autonomt eller separat system för styrning av MJ-banan innebär det att numer krävs Internet om man vill följa med i utvecklingen av TrainController. Det här kan ställa till en hel del problem. Om MJ-banan är förlagd i källarplanet, i avlägset uthus eller garage, saknas kanske fast Internet och den trådlösa signalen, eller mobilsignalen, är för svag. Då måste man ta tag i det problemet och lösa det på något vis. Jag känner till åtminstone en klubb-bana som har det här problemet.
Med datorn uppkopplad mot Internet känner de flesta till att datorn kanske inte alltid går igång så snabbt eftersom det kan ligga Windows-uppdateringar som trycker på och försenar uppstart. Det är ju lite trist att behöva vänta kanske ett par timmar innan man kan köra tågen…. Samma sak vid avstängning, där man ibland bara ges alternativet ”update and close”, vilket också kan ta timmar….. Och man tvingas låta spänningen vara påslagen i källaren, garaget eller uthuset tills uppdateringen behagat gått färdigt.
Ibland går Internet-förbindelsen ner, vid ett tillfälle nyligen under ett antal dagar, då måste man ha ett reservalternativ ifall man vill köra tågen. Det kanske fungerar att sätta upp mobiltelefonen som en hotspot, men det är ju lite struligt behöva hålla på med sånt också…..
Z21:ans LAN-port är kopplad till en av fyra lediga LAN-portar på den från Roco medföljande routern. För anslutning till Internet, kopplas WAN-porten till en av fyra lediga LAN-portar på hemmaroutern, se följande bild.

TrainController – några tips
Automatisk styrning: När TC styr tågen helt på egen hand, t.ex. ”Spontaneous run” och ”Drag and Drop” har man inga möjligheter att sätta upp egna villkor – utan det blir som det blir utifrån systemets egna beräkningsalgoritmer. Min kryssväxel har visat sig vara notoriskt svår för TC att hantera – med tåg på kollisionskurs vid upprepade tillfällen. Kryssväxeln är kopplad så att den inte kan läggas i båda sidospår samtidigt, medan TC tror att det är helt möjligt att göra så. Jag har satt dit en Arduino mikrodator med ett program som har förbättrat situationen något, men tyvärr är inte problemet helt eliminerat. På ett annat ställe, i den halvengelska växeln, för att få frogg-styrningen fungera korrekt (se under fliken ”Byggtips”), måste även en skyddsväxel på angränsade spår läggas i skyddsläge – vilket TC naturligtvis inte klarar i sitt automatläge. Det här löstes genom att lägga in en fiktiv dummyväxel, kopplad med skyddsväxeln, i TC spårplanen. När TC ställer tågvägen genom dummyväxeln slår också skyddsväxeln om, och vi får korrekt frogg-matning i den halvengelska växeln. Numer använder jag automatstyrningen ytterst sparsamt, och har istället gått över till ”Schedules”, där man själv programmerar i detalj vad som ska hända i olika situationer, vilka villkor som ska gälla, osv.
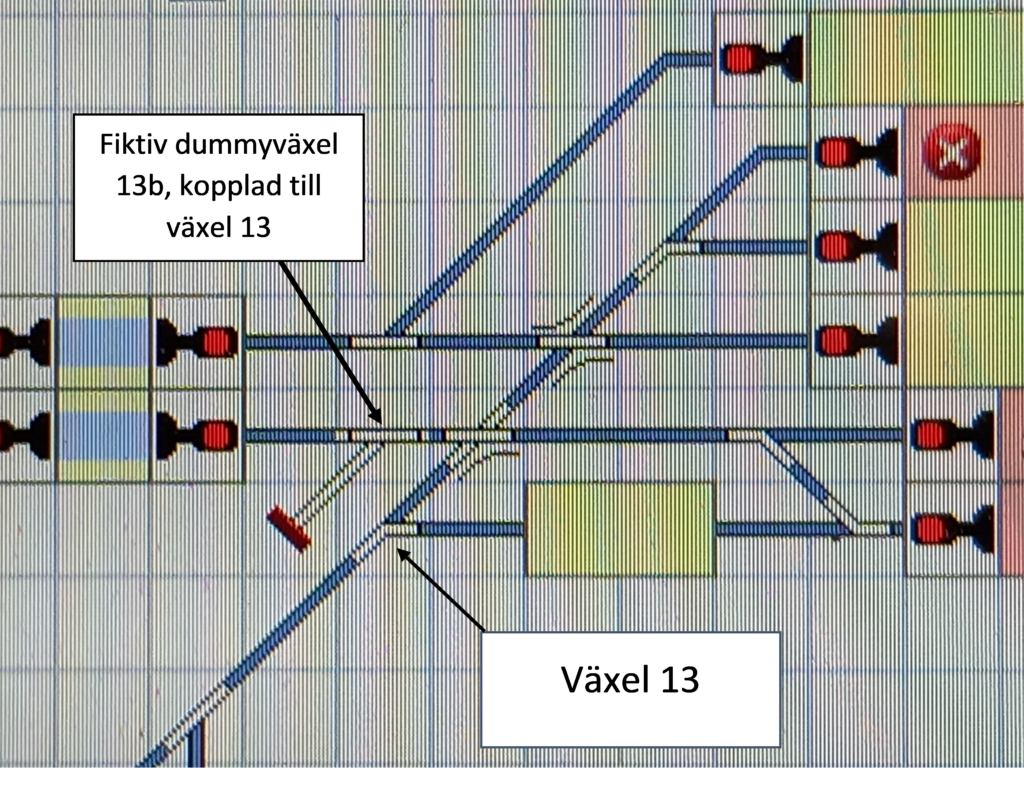
Vid tågväg från vänster till höger (eller vice versa) genom den halvengelska växeln, ställs den fiktiva växeln 13b i rakspår. Eftersom den är kopplad med växel 13, läggs den i skyddsläge (sidospår), och vi får korrekt frogg-matning till den halvengelska växeln.
Hastighetsprofilering: Tycks vara väldigt störkänsligt och med många avbrutna förlopp. För min del är det näst intill omöjligt kvällstid, vilket jag kopplar till att TVn och datorer med sina wifi med mera är påslaget i rummen intill, för det går mycket bättre att profilera på morgonen när det är lugnt i huset….
Vilsna tåg: Det händer ibland att TC tappar bort ett tåg, ibland av oförklarliga skäl, men ofta ligger förklaringen i att en växel inte har slagit om, eller en spårledning som inte har ”dragit” eller ”släppt” korrekt. Det sägs att Railcom kan avhjälpa det här problemet, i och med att tågen rapporterar sin position och identitet till systemet, men jag har ännu inte hunnit testa detta.
”Lingon och mjölk”: Eller fladdrande spårledningar. Uppstår av glappande motståndsvagnar när de rullar över spårledningen. Motverkas genom att lägga in en ”after-glow” på ca 5 sek för varje spårledning i TC (dvs. efter varje ”släpp”, lys 5 sekunder extra).